Controls

Get in Touch
Autonomous Underwater Vehicle
Designed a state-feedback control system that can control the H-AUV (Autonomous Underwater Vehicle) depth and longitudinal position.
Role
- Modeled MIMO dynamic systems using state-space techniques.
- Analytically and numerically solved for the dynamic response of any linear dynamic system and relate the response to the state-space system description.
- Analyzed the open-loop and closed-loop stability of any state-space representation.
- Designed linear state-feedback controllers using pole placement techniques.
- Designed optimal linear state-feedback controllers using Linear Quadratic Regulator (LQR) technique.
- Designed linear output-feedback controllers using a Luenberger Observer state estimator.
- Designed optimal linear state-feedback controllers using Linear Quadratic Integral (LQI) technique.
Languages Used
- Matlab
- Latex
Model Reference Adaptive Control (MRAC)
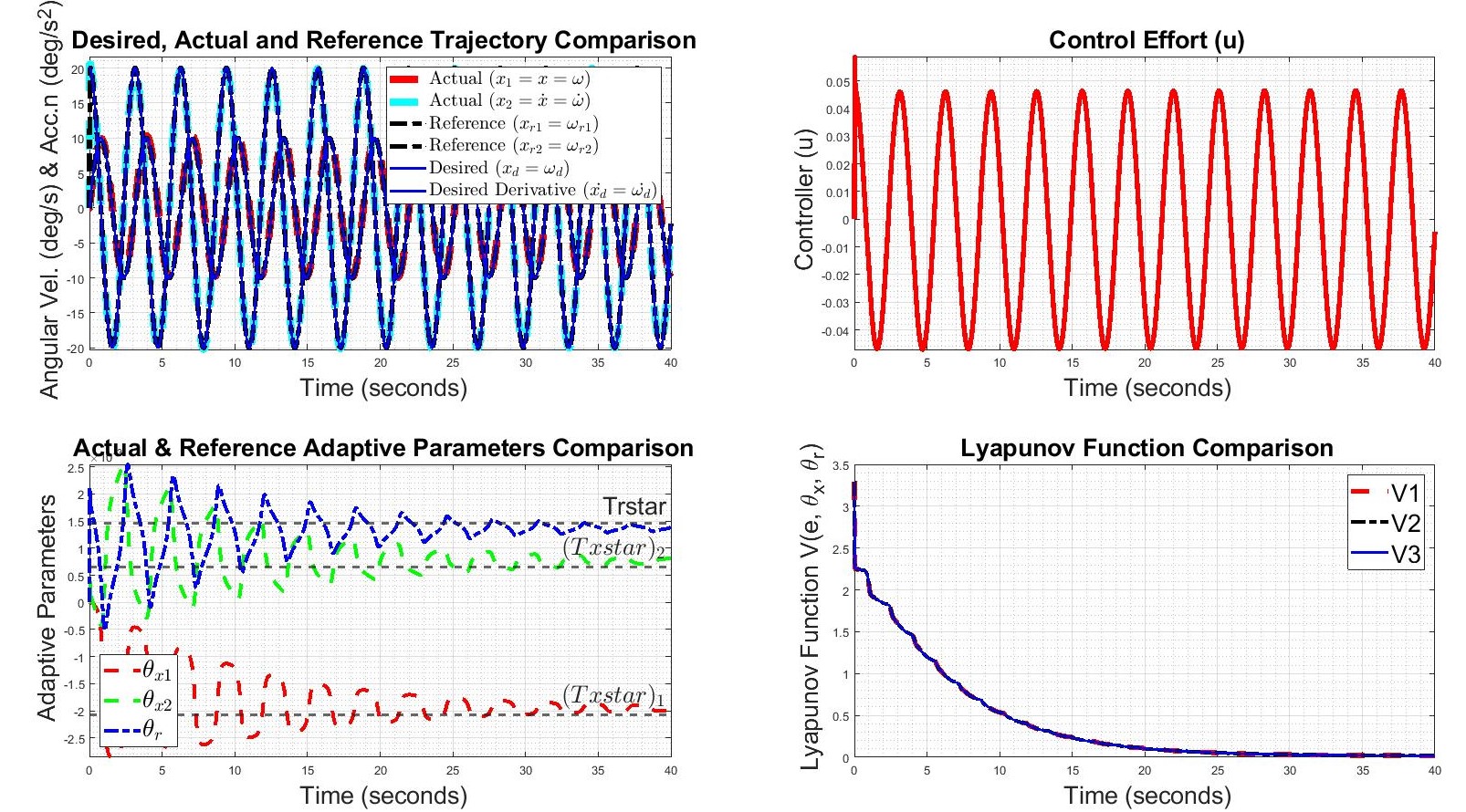
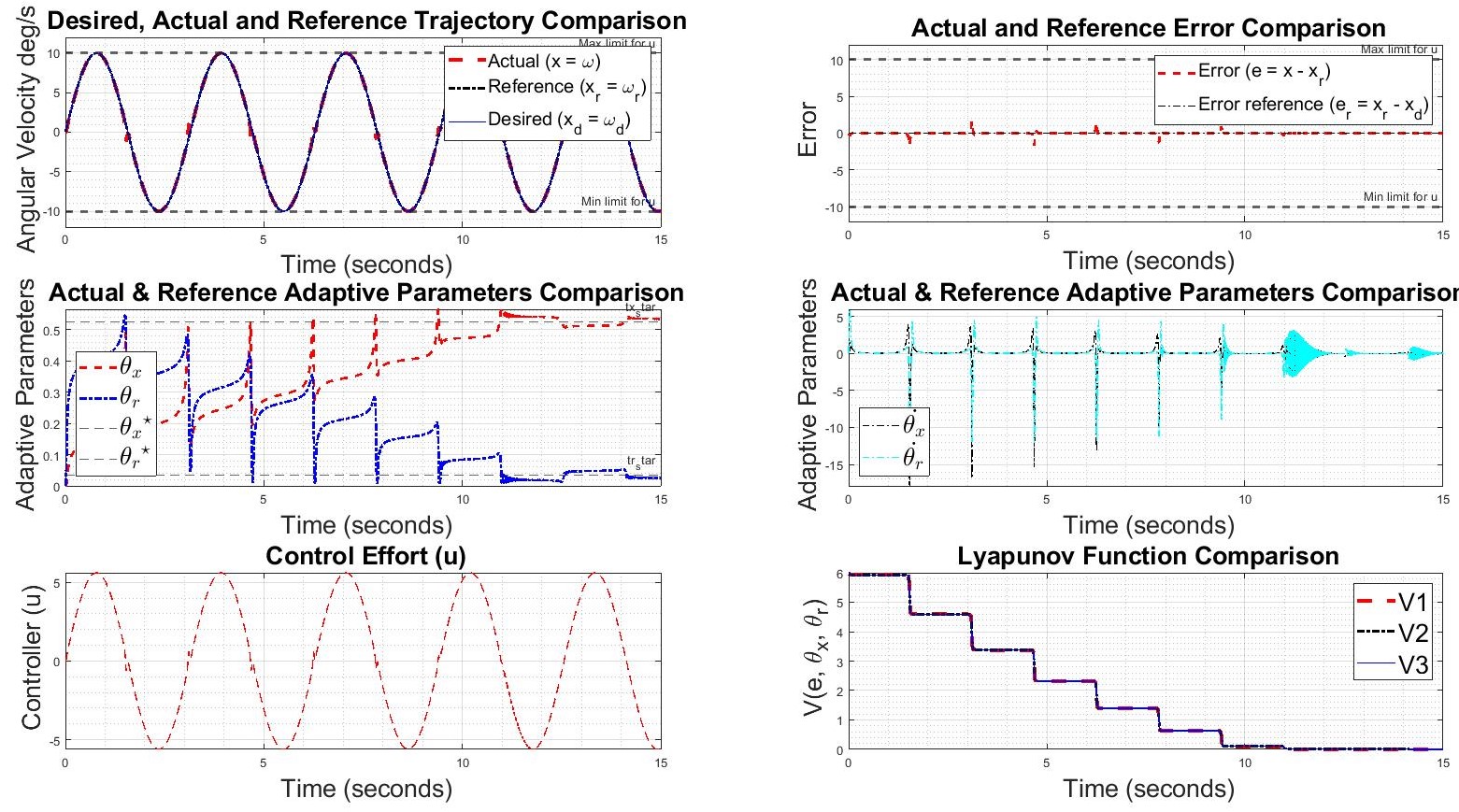
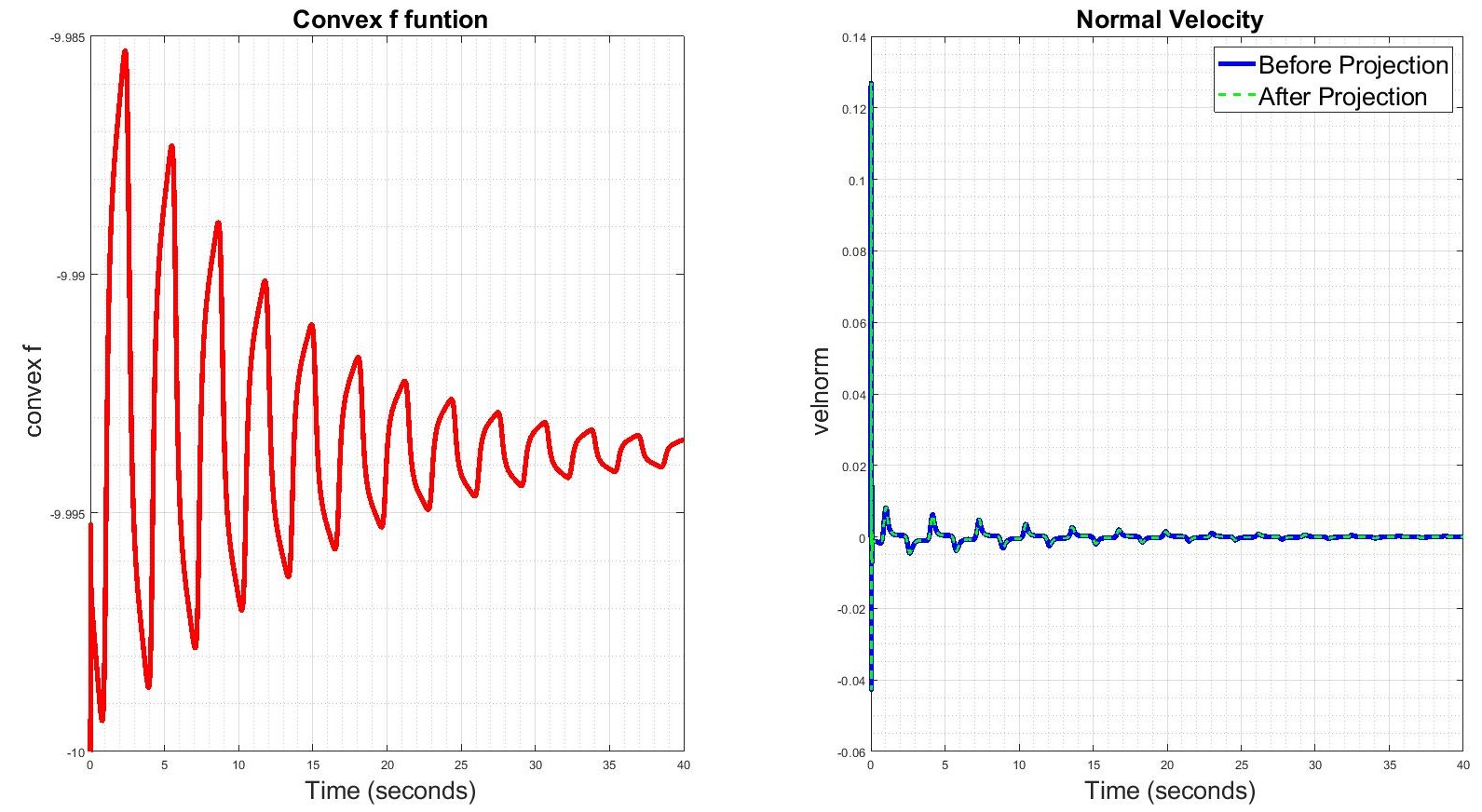
Designed a model reference adaptive controller for a DC motor drive, so that the approximate velocity tracking may be achieved without knowledge of motor, or load.
Role
- Designed an adaptive controller for the reduced first order and full second order state feedback system.
- Designed and applied appropriate Projection algorithm with aboundary layer to the controller.
- Analyzed the lyapunov function stability of the adaptive controller.
- Designed an adaptive controller for Full output feedback system.
Languages Used
- Matlab
- Simulink
System ID & Output Feedback
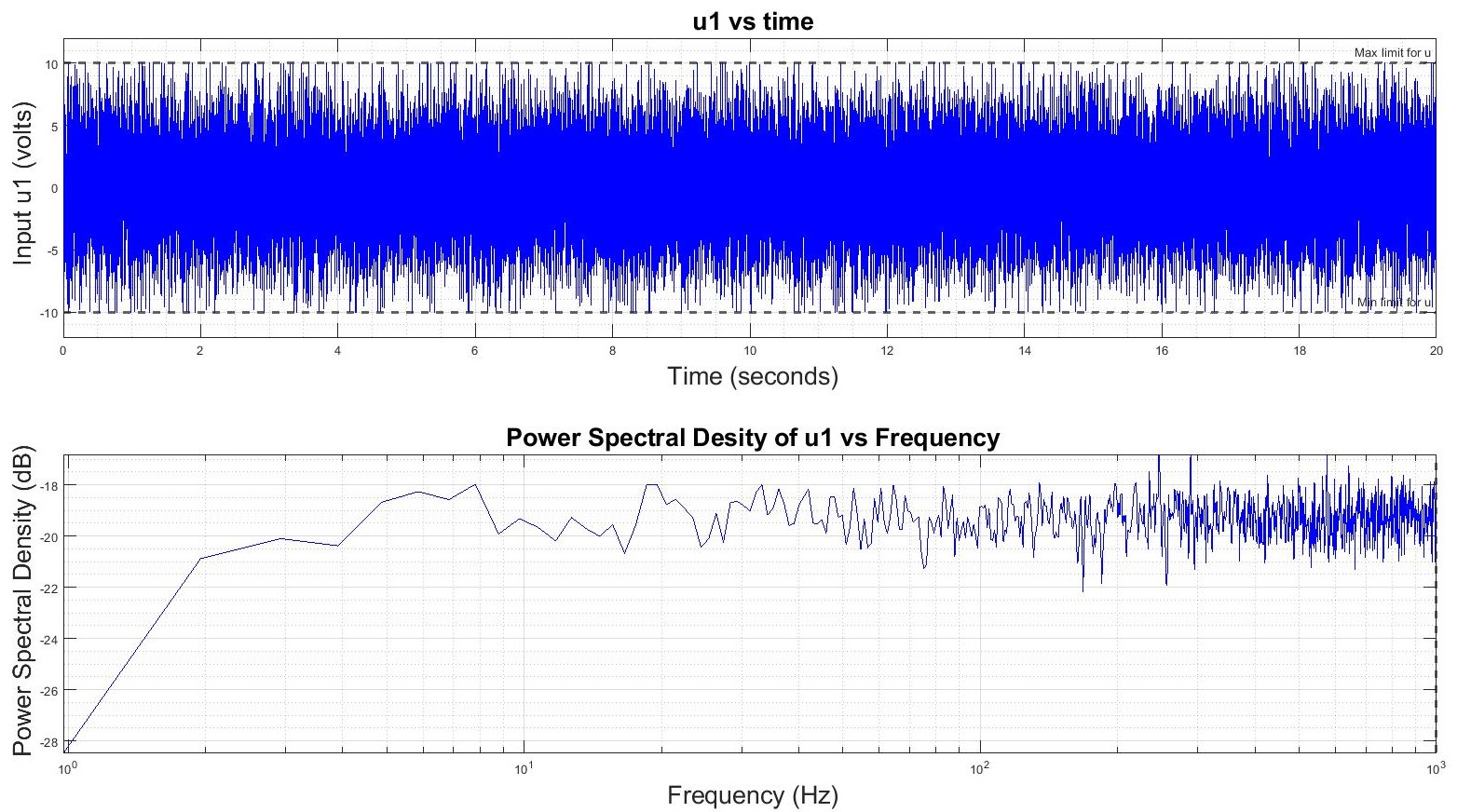
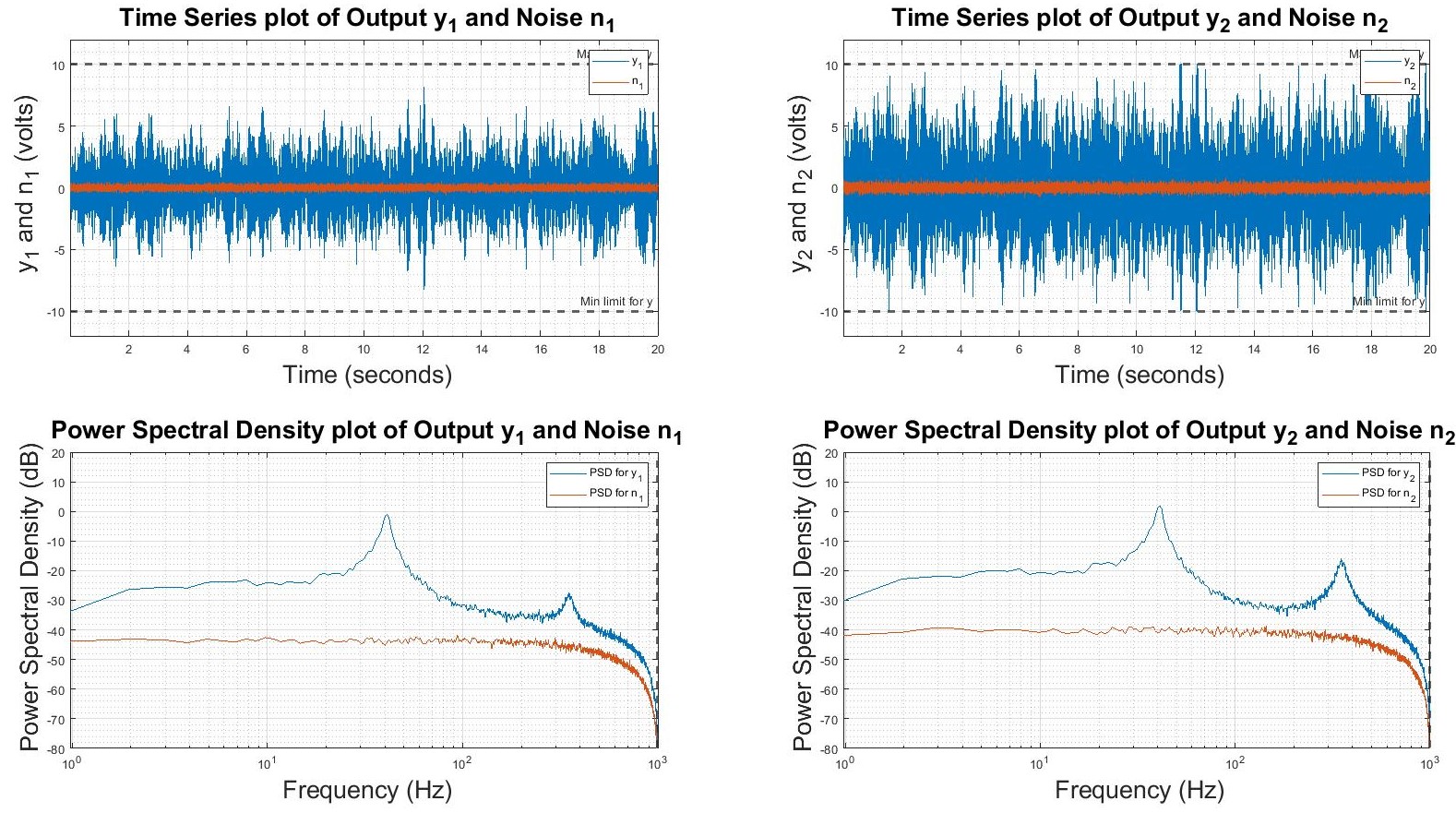
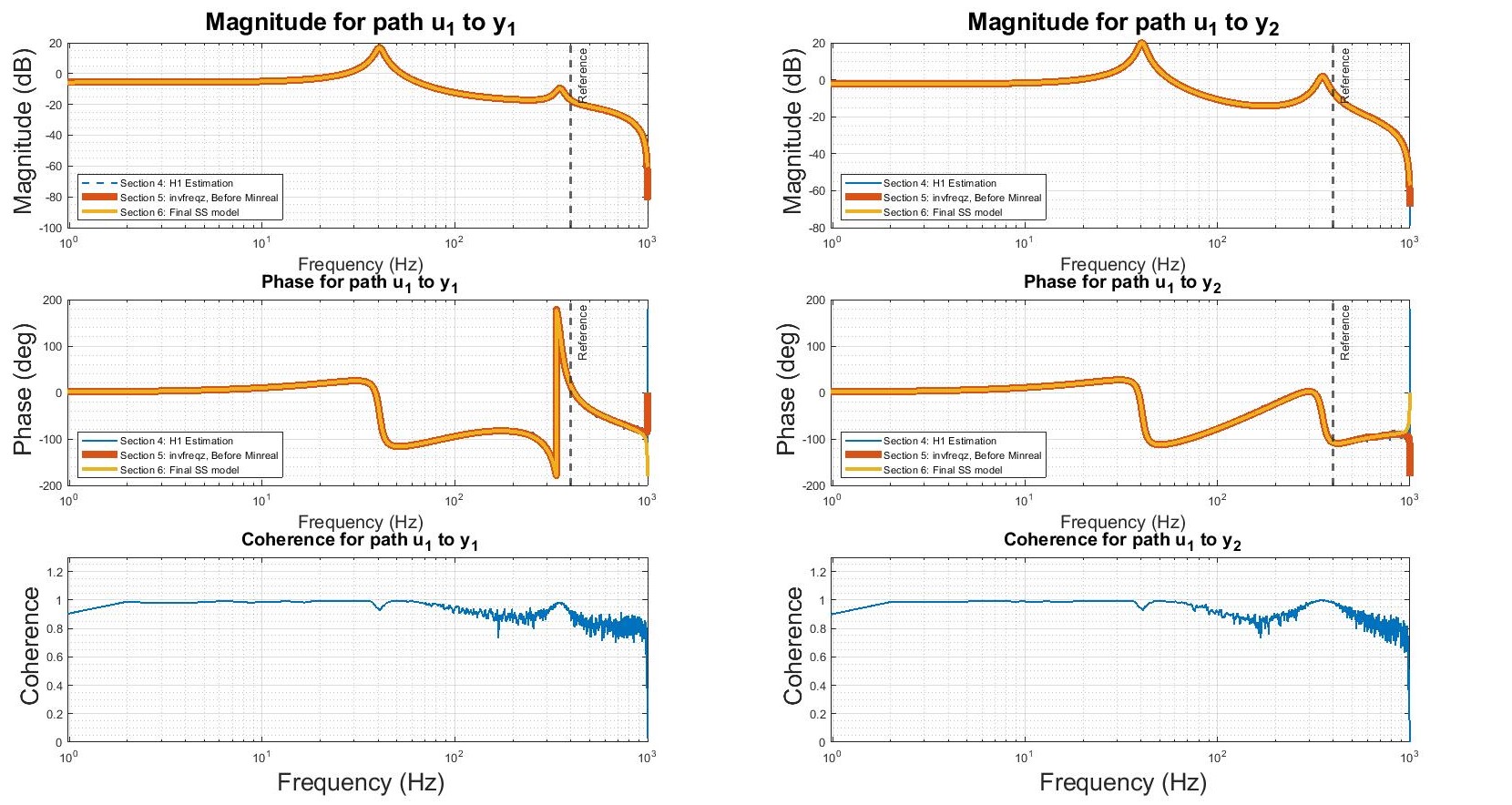
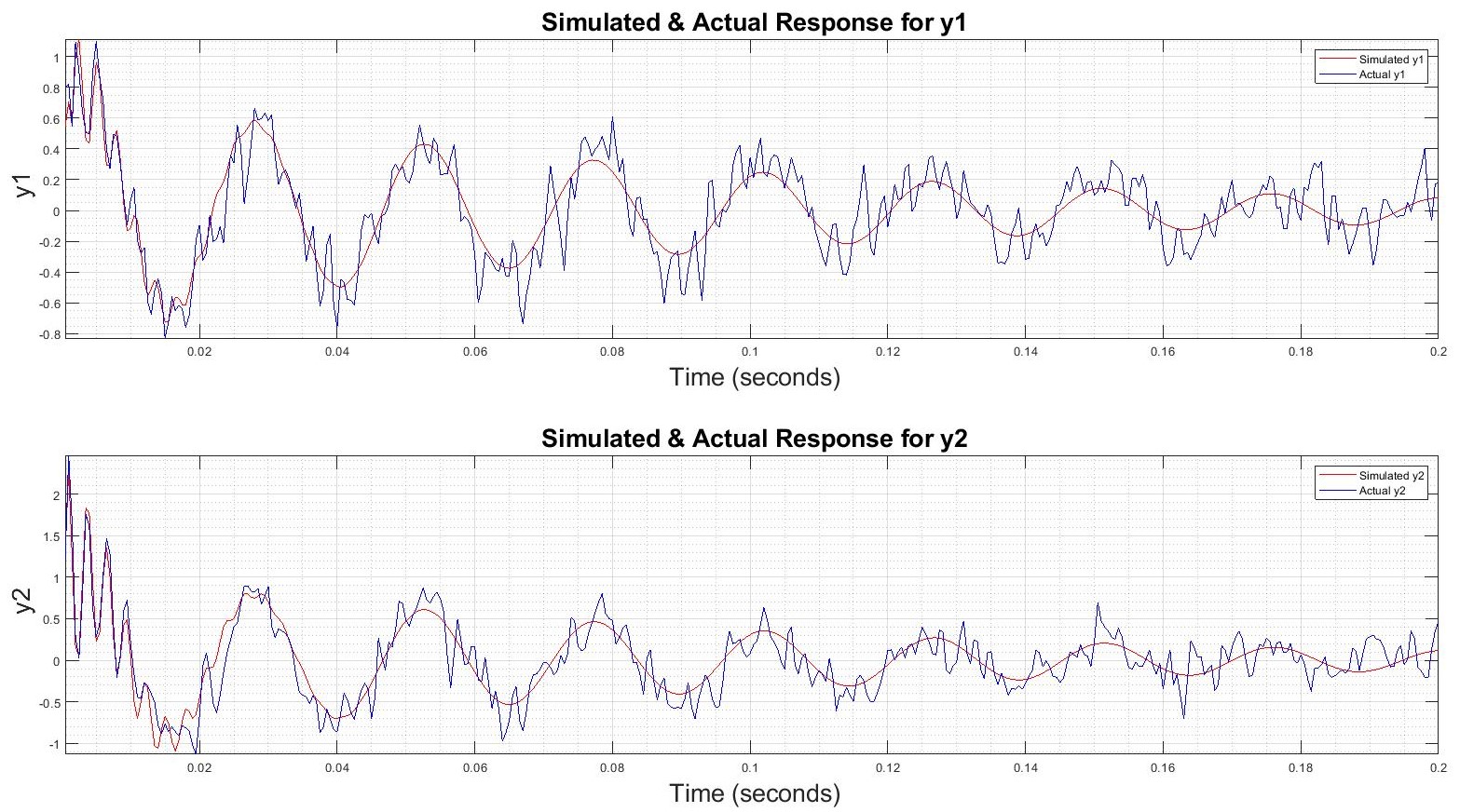
Developed and validated an output feedback controller & empirical discrete-time state-space model of the dynamic system.
Role
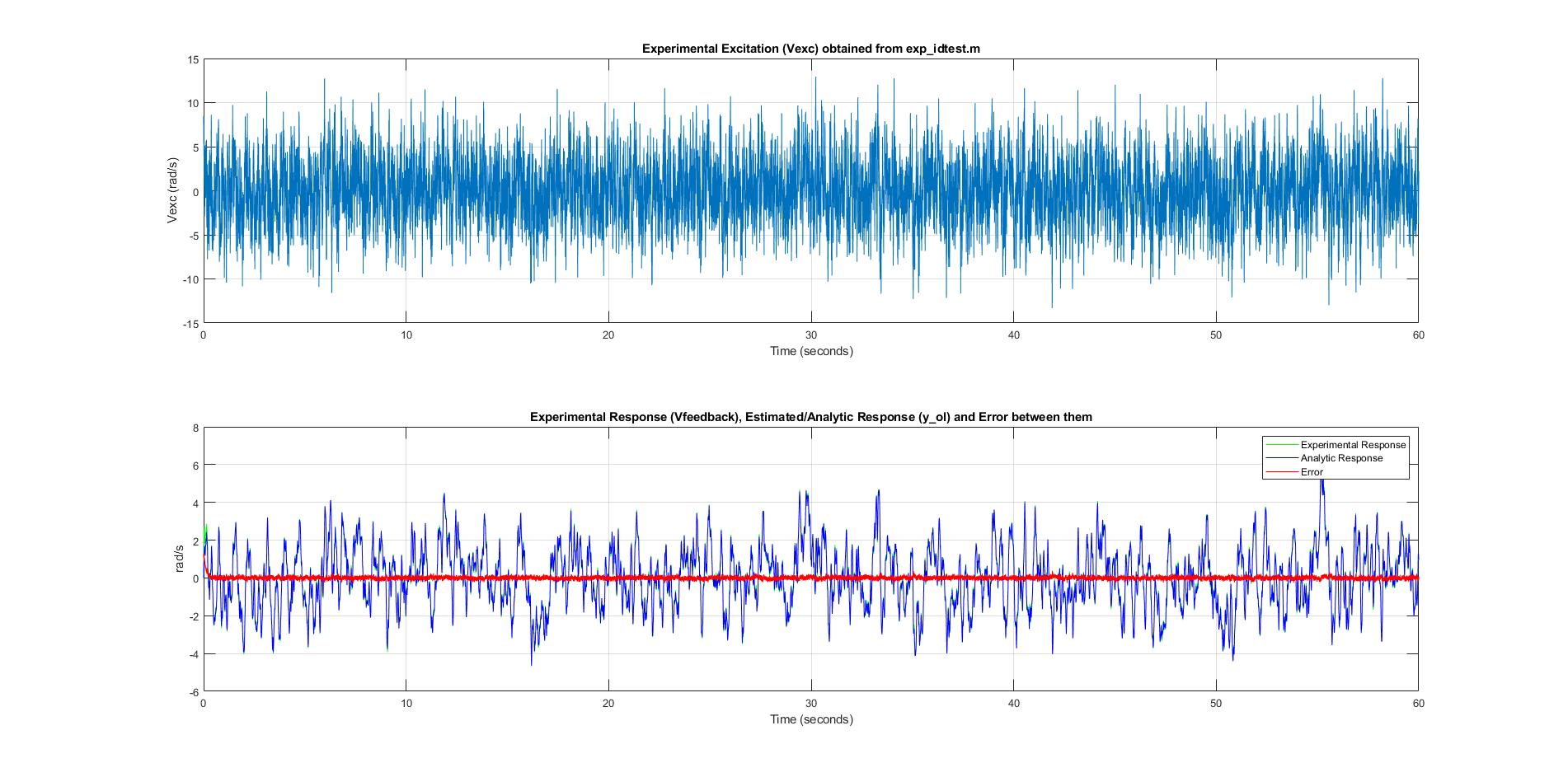
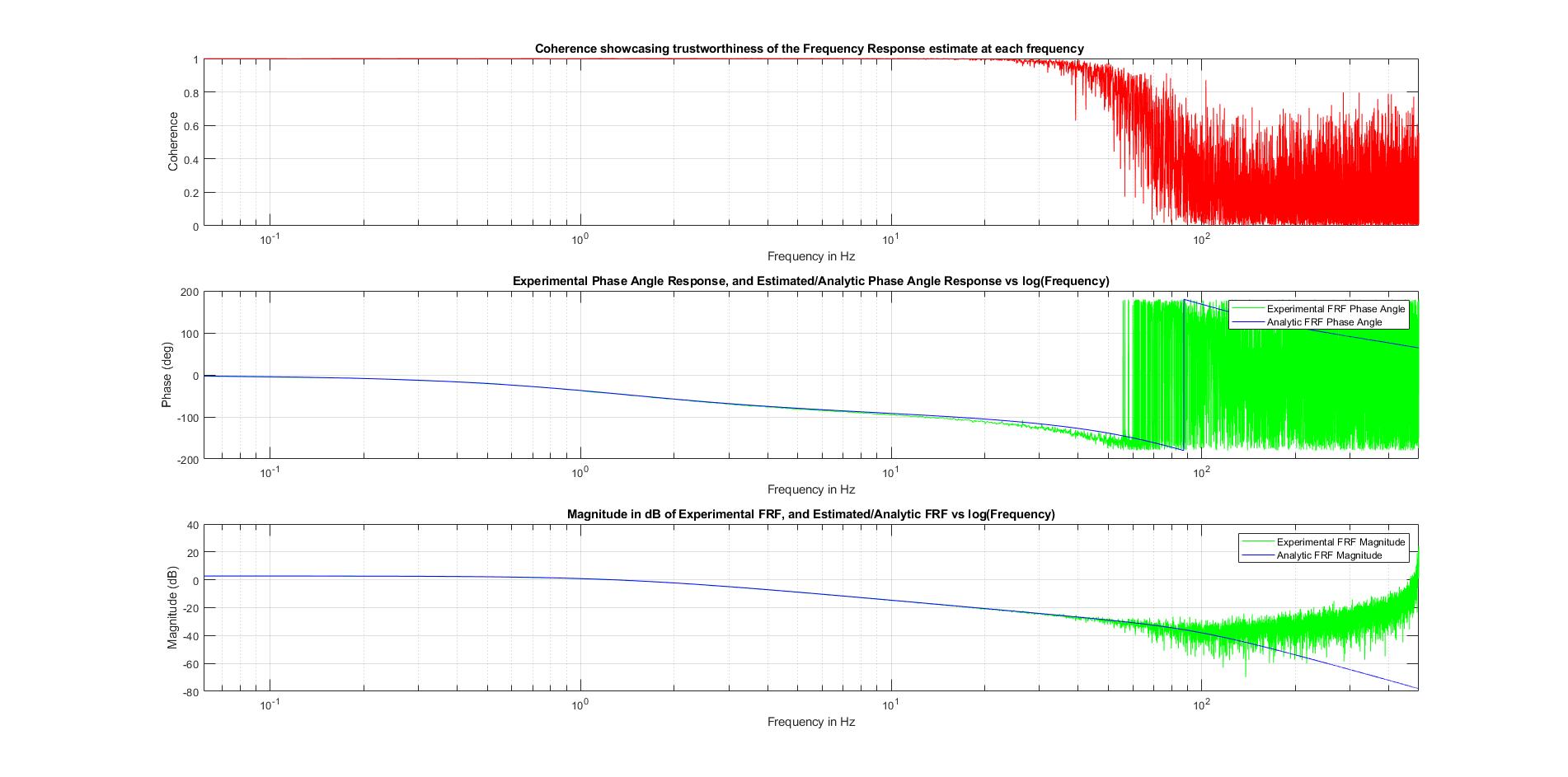
- Applied H1 estimate technique to estimate the frequency response function and estimated coherence of each path
- Estimated Discrete time transfer functions for each path using
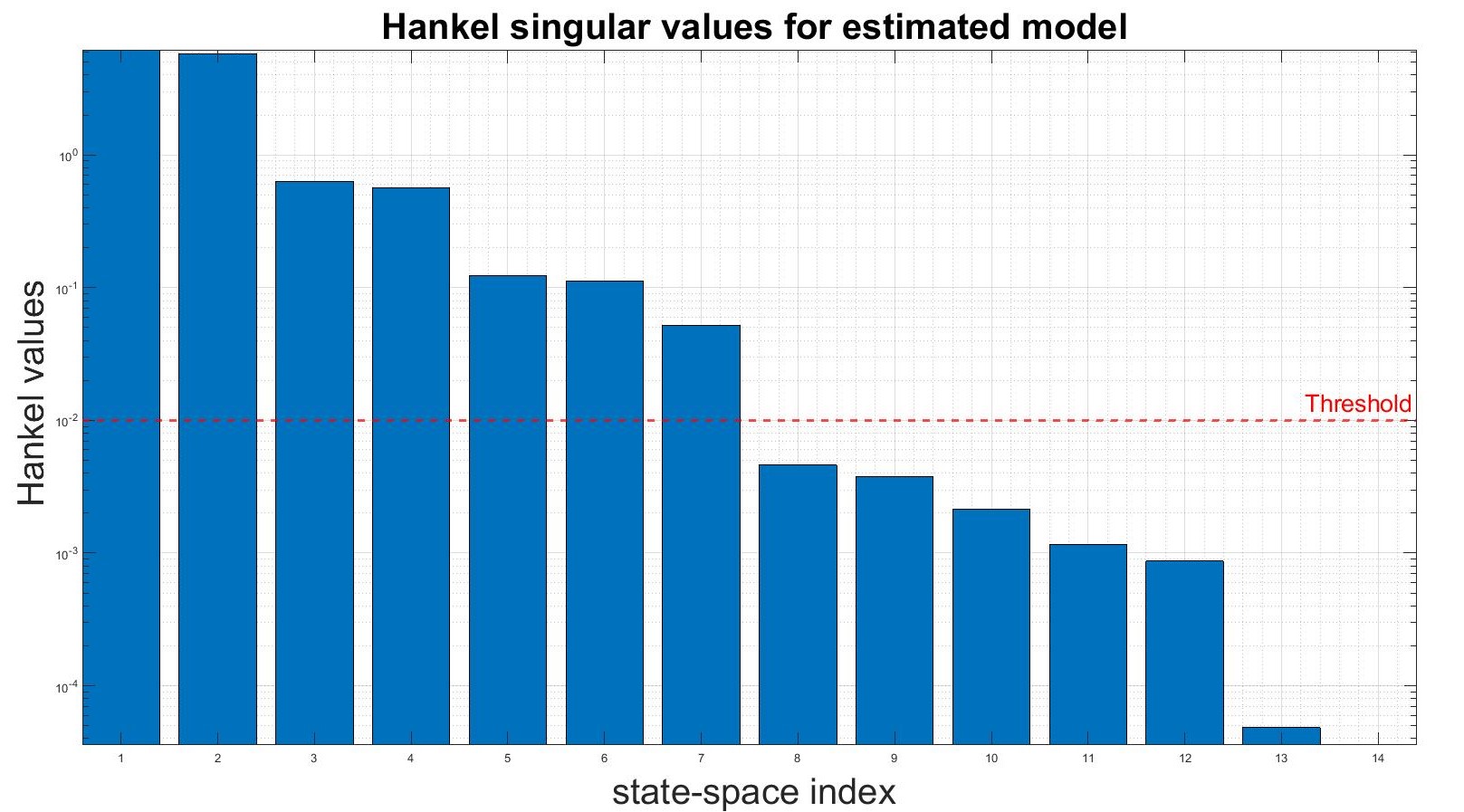
invfreqz()function and converted it into minimum realization usingminreal()function - Generated a Balanced Realization using
balreal()and plotted the Hankel singular values to help generate a reduced order LTI discrete time state space model usingmodred() - Generated z-domain grid to plot the z-domain eigen values (poles) for each path using
zgrid()function. - Tested the Discrete State-Space Model for controllability and observability using
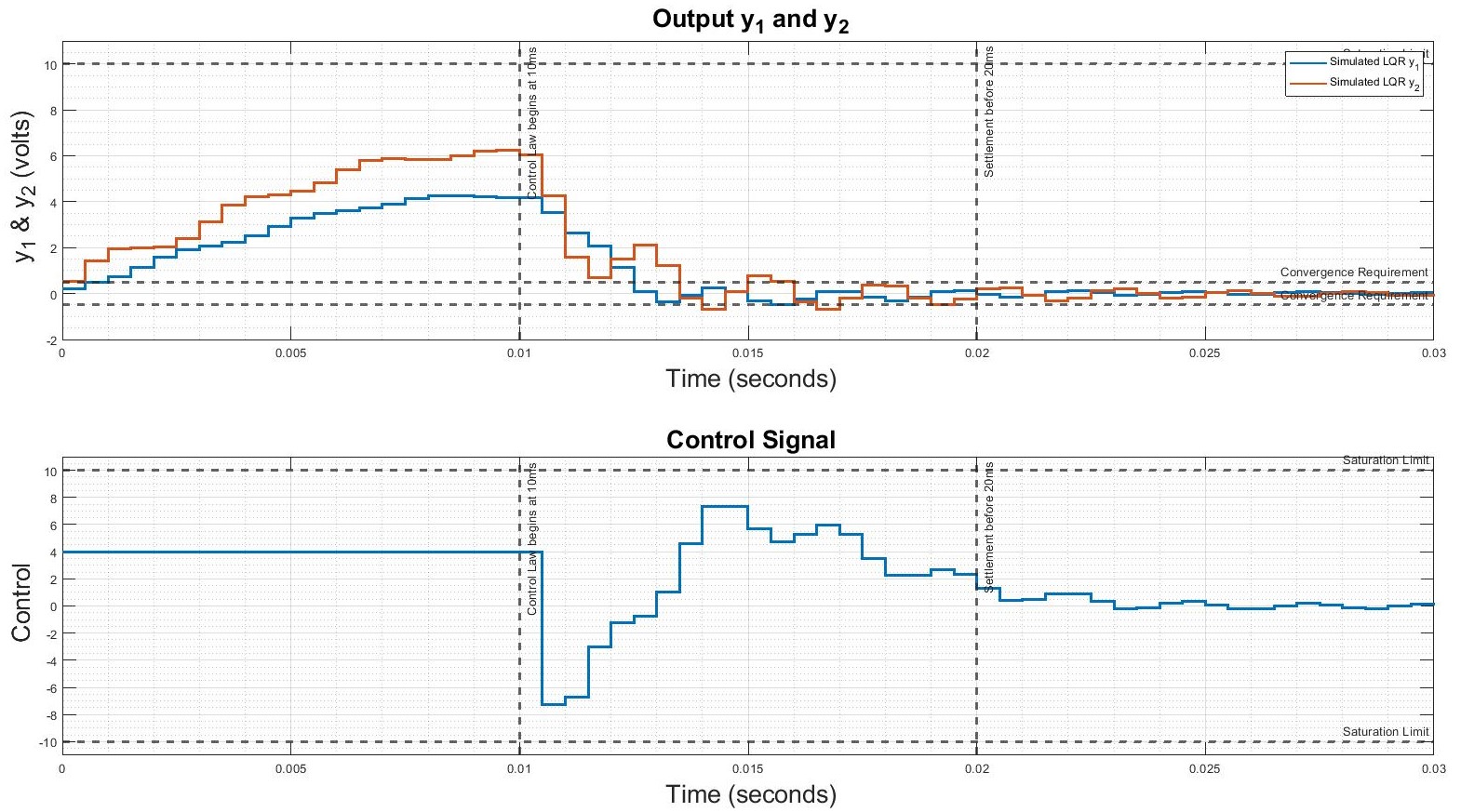
ctrb()andobsv()functions - Designed an LQR state feedback controller using
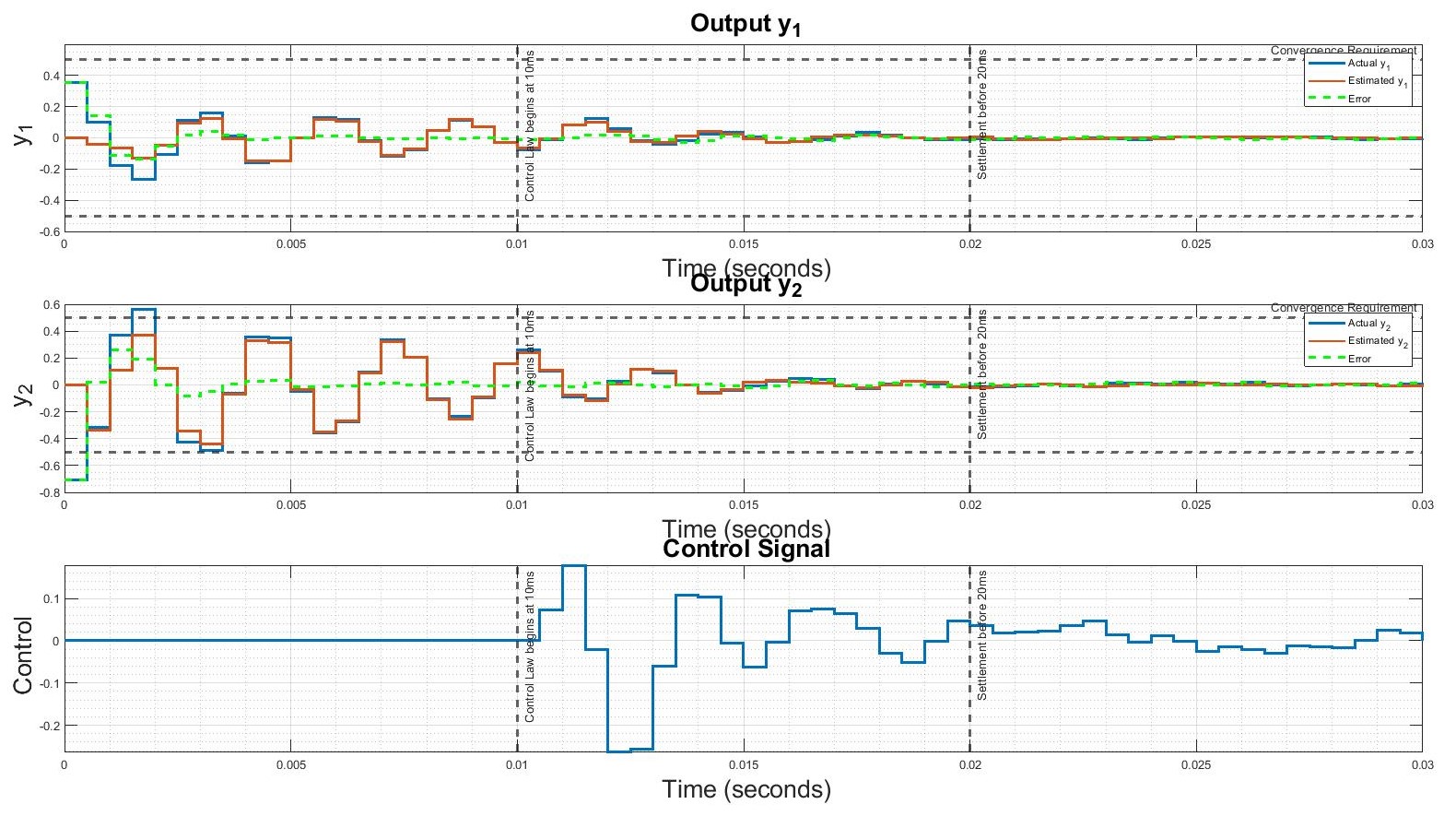
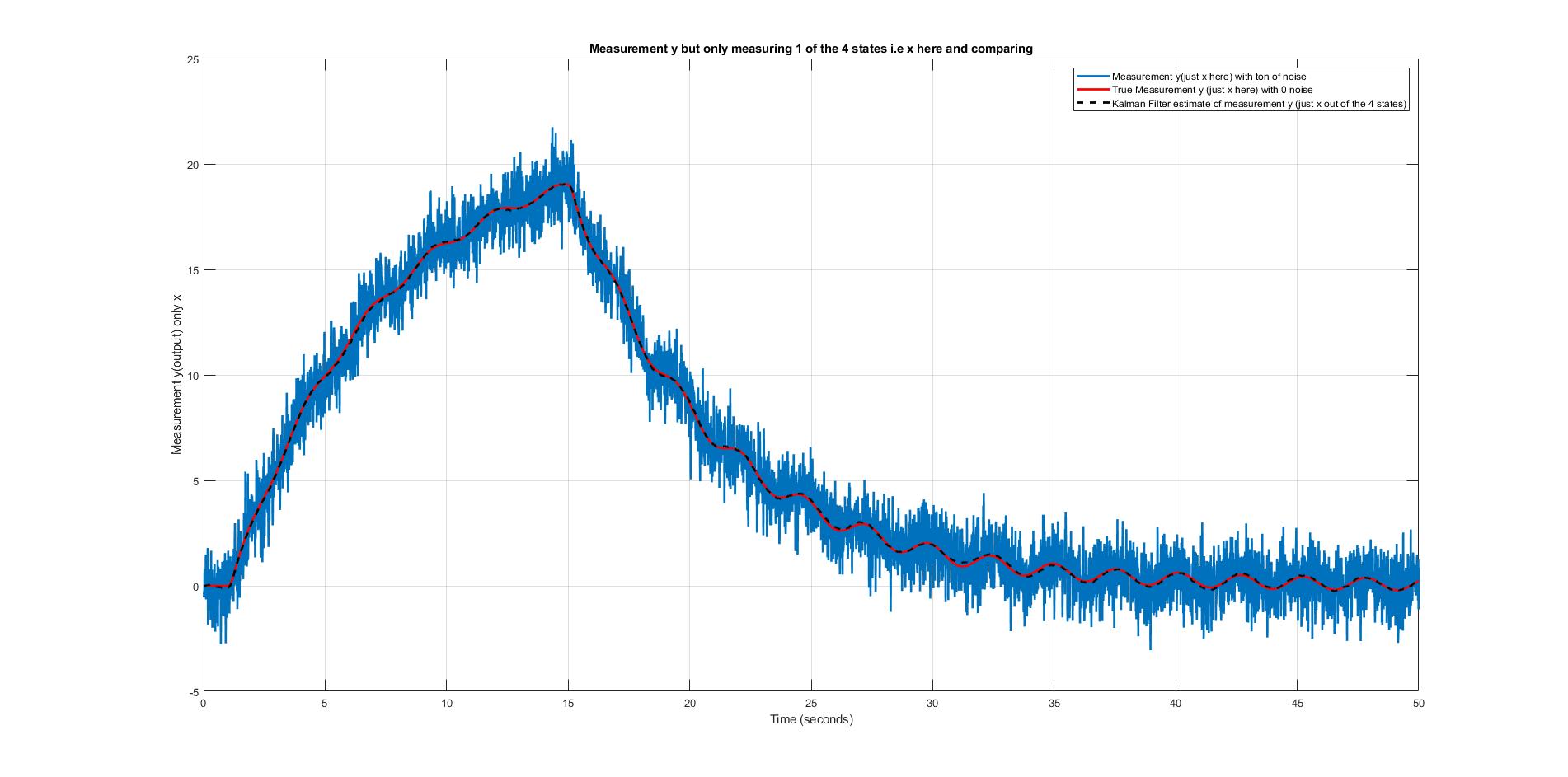
lqr()function to generate a closed-loop time response - Estimated the state vector by designing the appropriate Kalman state feedback gain using
kalman()function - Constructed the discrete-time state space output feedback controller LTI object and generated the closed loop response
Languages Used
- Matlab
- Simulink
Inverted Pendulum On A Cart
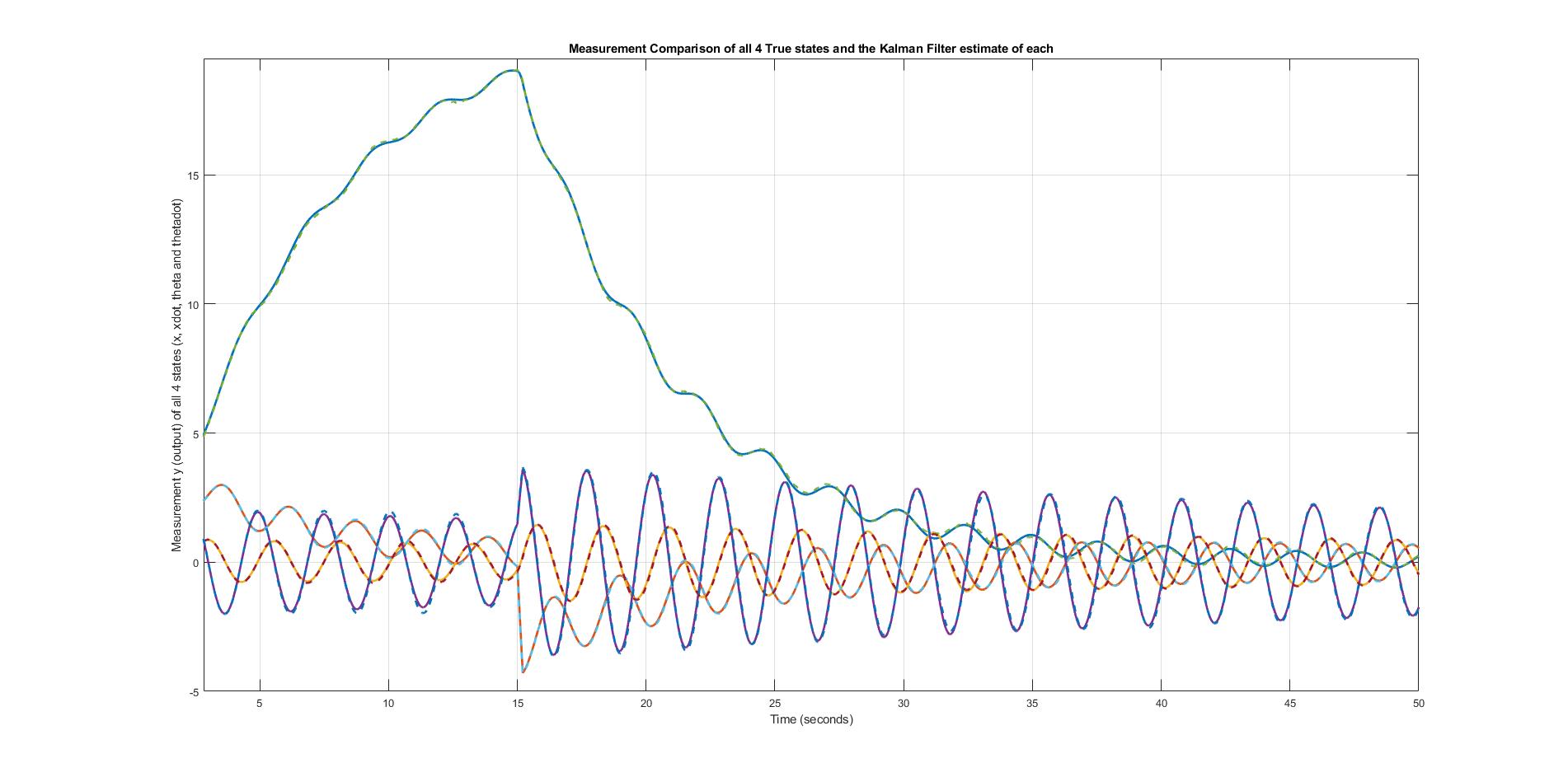
Stabilized the full nonlinear system of an Inverted Pendulum on a Cart using combination of Kalman Filter and LQR controller.
Role
- Modeled MIMO dynamic systems using state-space techniques.
- Numerically Linearized the full nonlinear system.
- Designed linear state-feedback controller using pole placement techniques.
- Designed optimal linear state-feedback controllers using Linear Quadratic Regulator (LQR) technique.
- Designed Kalman Filter, which is an optimal full-state estimator, given Gaussian white noise disturbances and measurement noise.
- Designed optimal linear state-feedback controllers using Linear Quadratic Regulator (LQR) technique.
- Combined the optimal full-state feedback LQR with the optimal full-state estimator (LQE or Kalman Filter) to obtain the sensor-based linear quadratic Gaussian (LQG) controller.
Languages Used
- Matlab
- Latex
DC Servo Motor
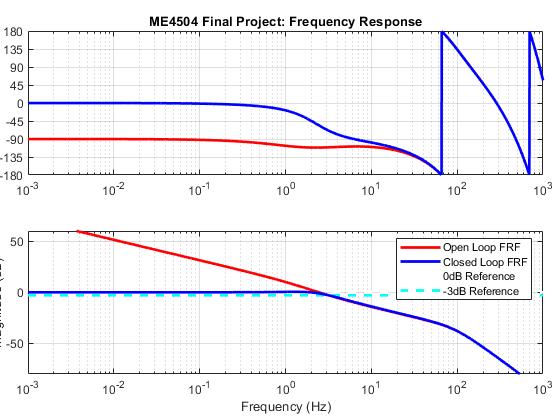
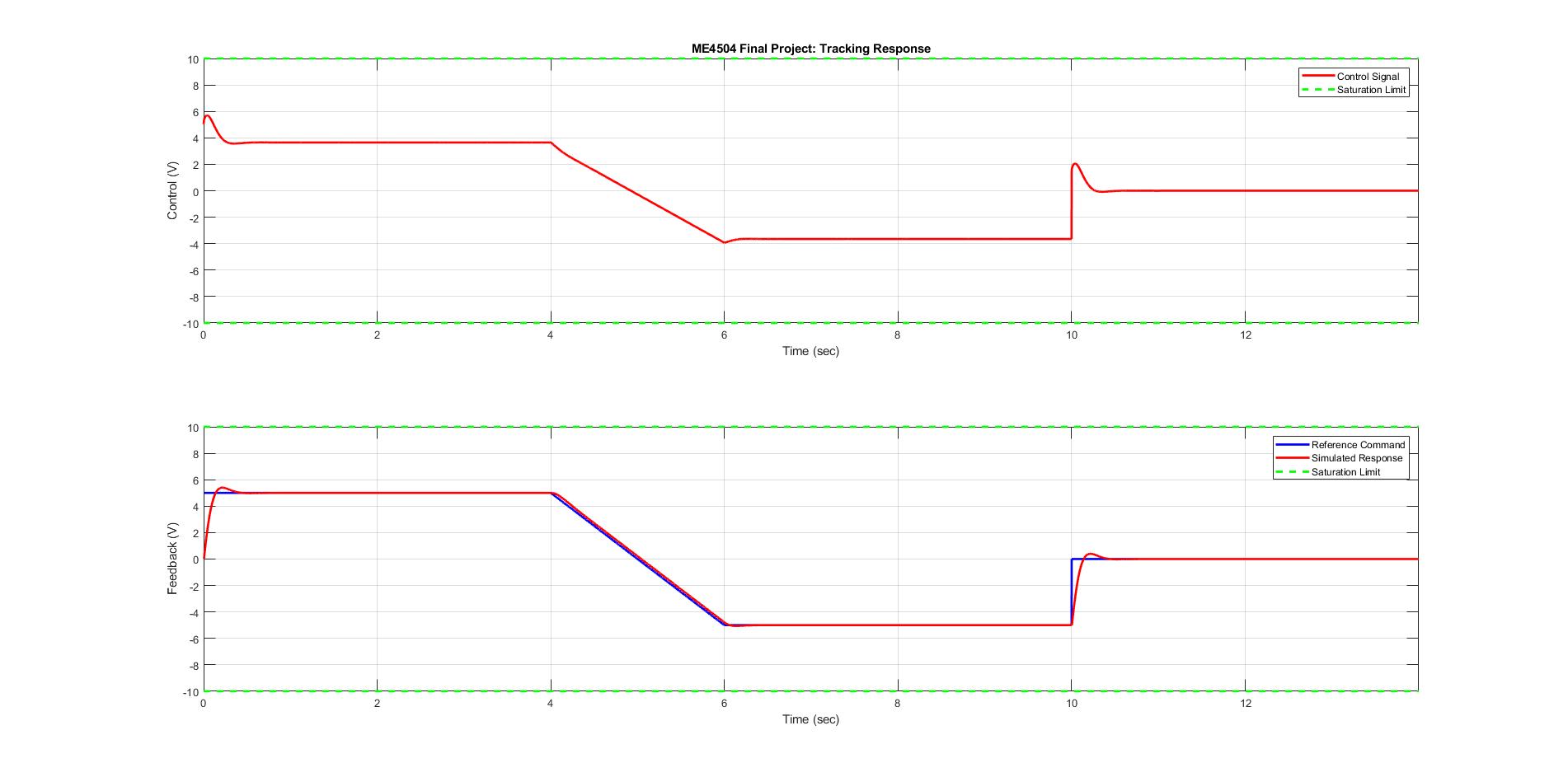
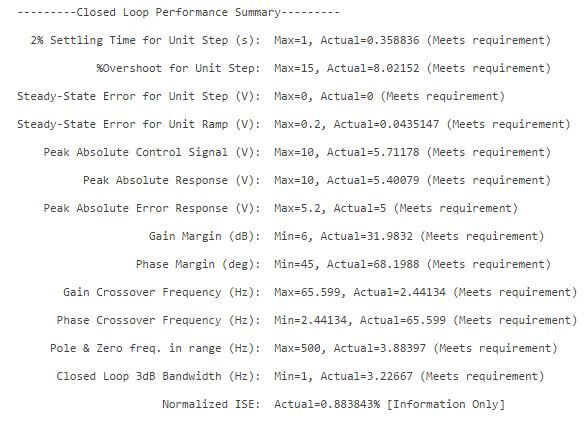
Designed a feedback compensator meeting performance specifications for DC Servo Motor model and thus evaluating stability margins.
Role
- Constructed a Matlab LTI object using an analytic motor model and parameter values from manufacturers data sheets.
- Estimated the open-loop frequency response from experimental time-domain data.
- Validated the Matlab model by comparing the time domain and frequency domain responses.
- Designed a feedback compensator to meet time domain and frequency domain performance specifications.
- Implemented the compensator design as an LTI object.
- Evaluated stability margins and performance metrics for your design.
Languages Used
- Matlab
- Latex
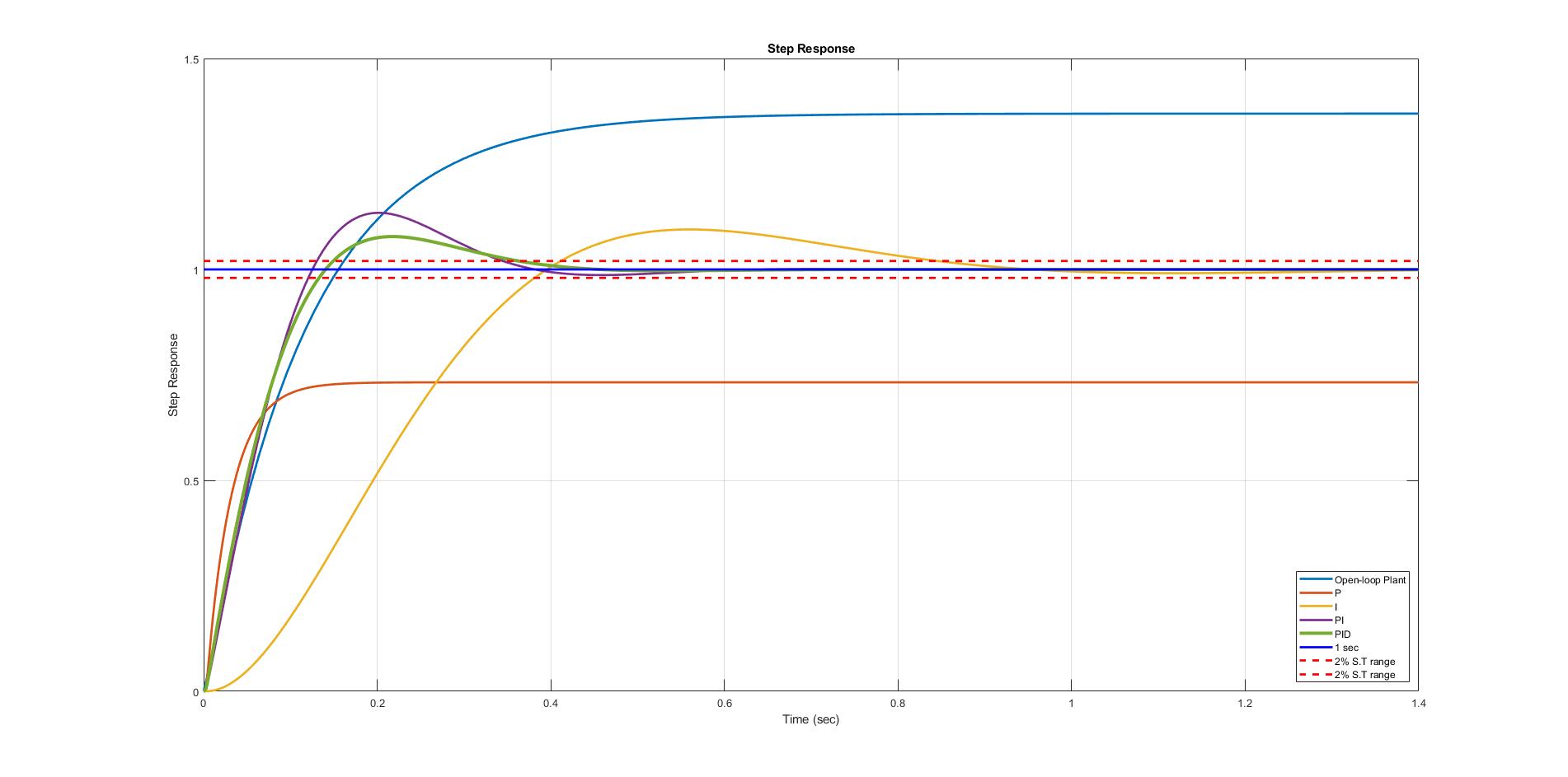
Cruise Control
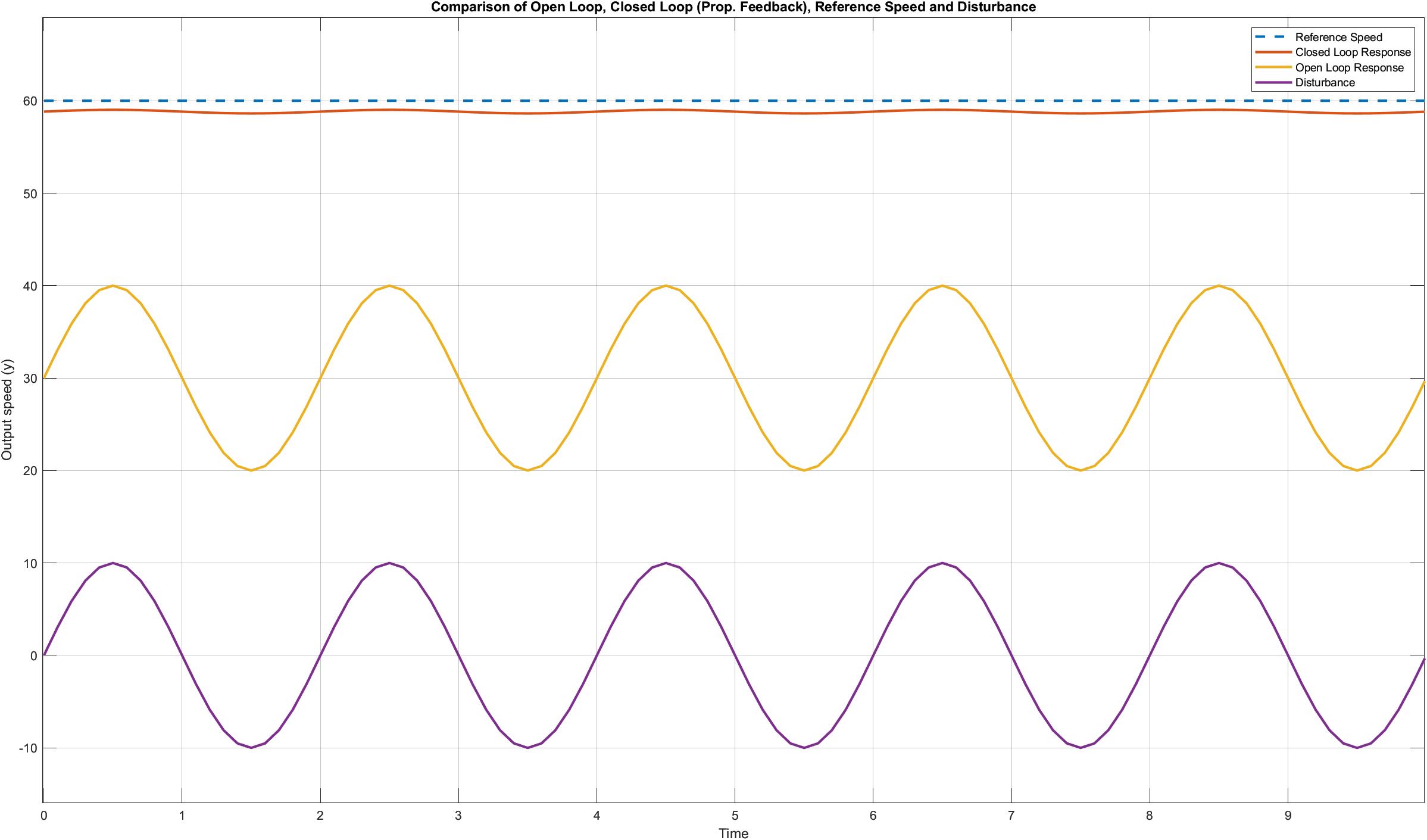
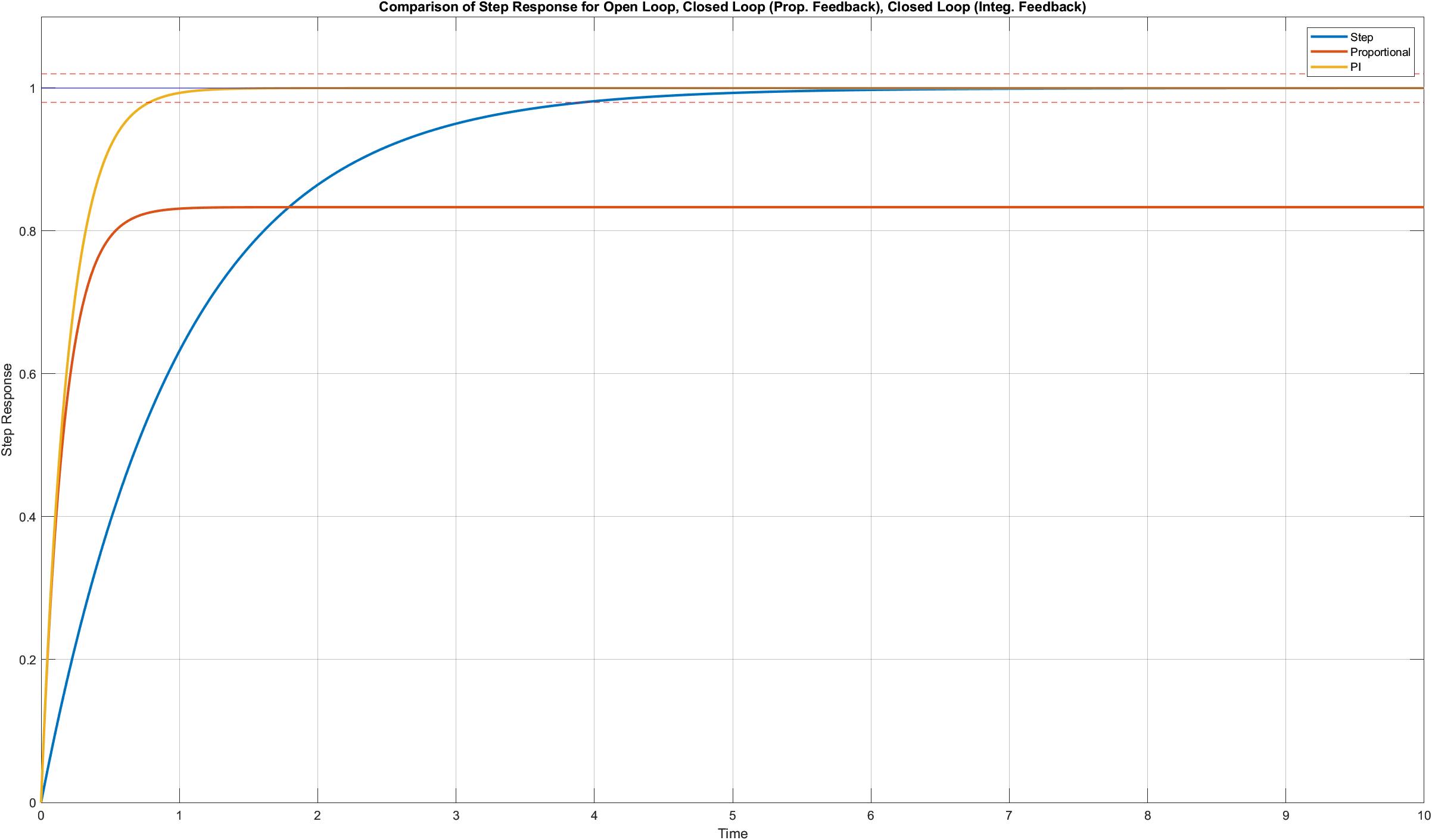
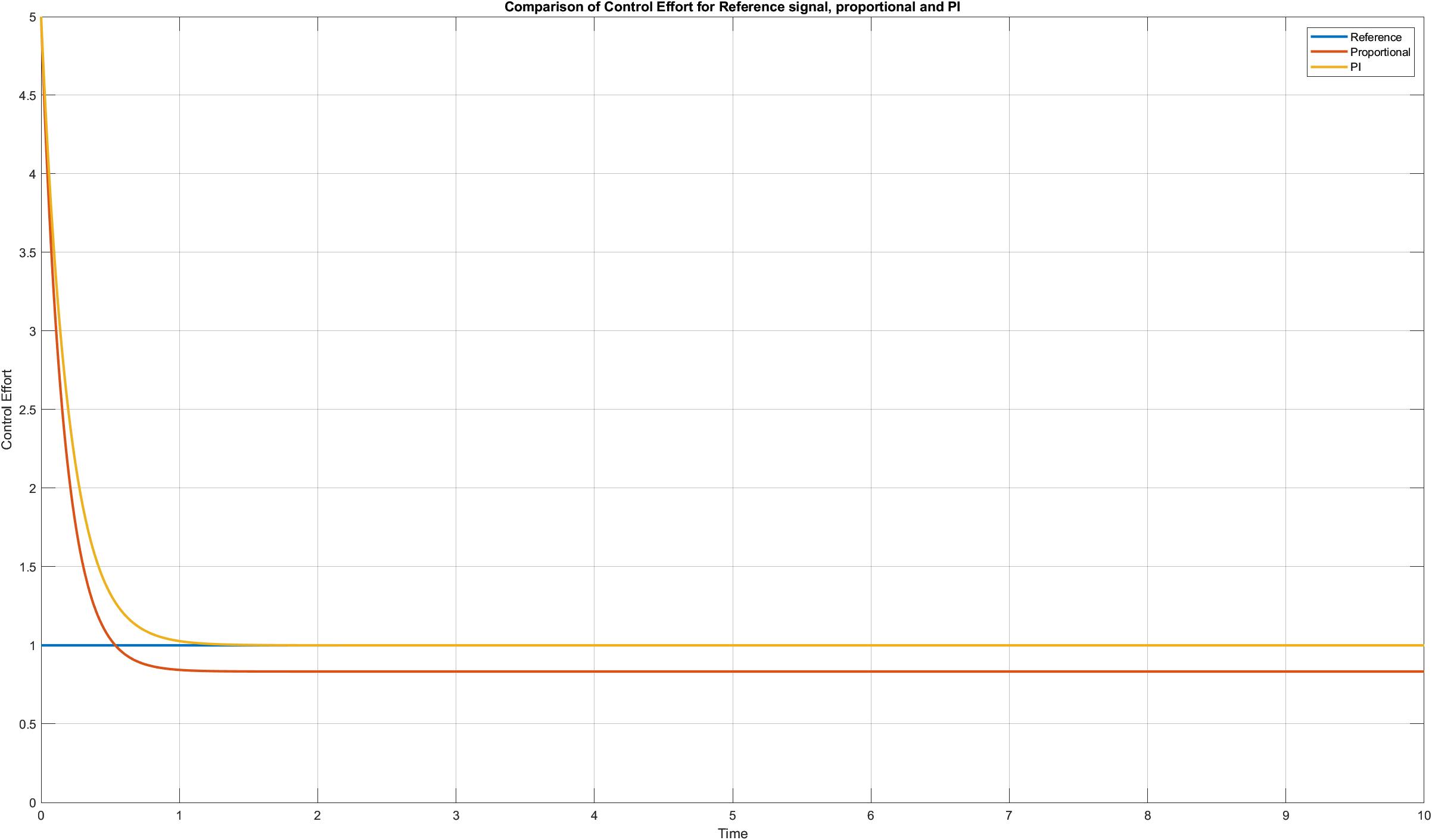
To shape the closed loop transfer function for a Cruise Control system and analyze the benefits of the feedback system.
Role
- Analyzed the benefits of feedback for a cruise control system with uncertain dynamics and disturbances.
- Designed Proportion-Integral Feedback controller to reduce the steady-state tracking error to zero.
- Shaping the loop transfer function to have desirable sensitivity and complementary sensitivity.
Languages Used
- Matlab
- Latex