Robotics
Get in Touch
Semi-Autonomous Ground Vehicle
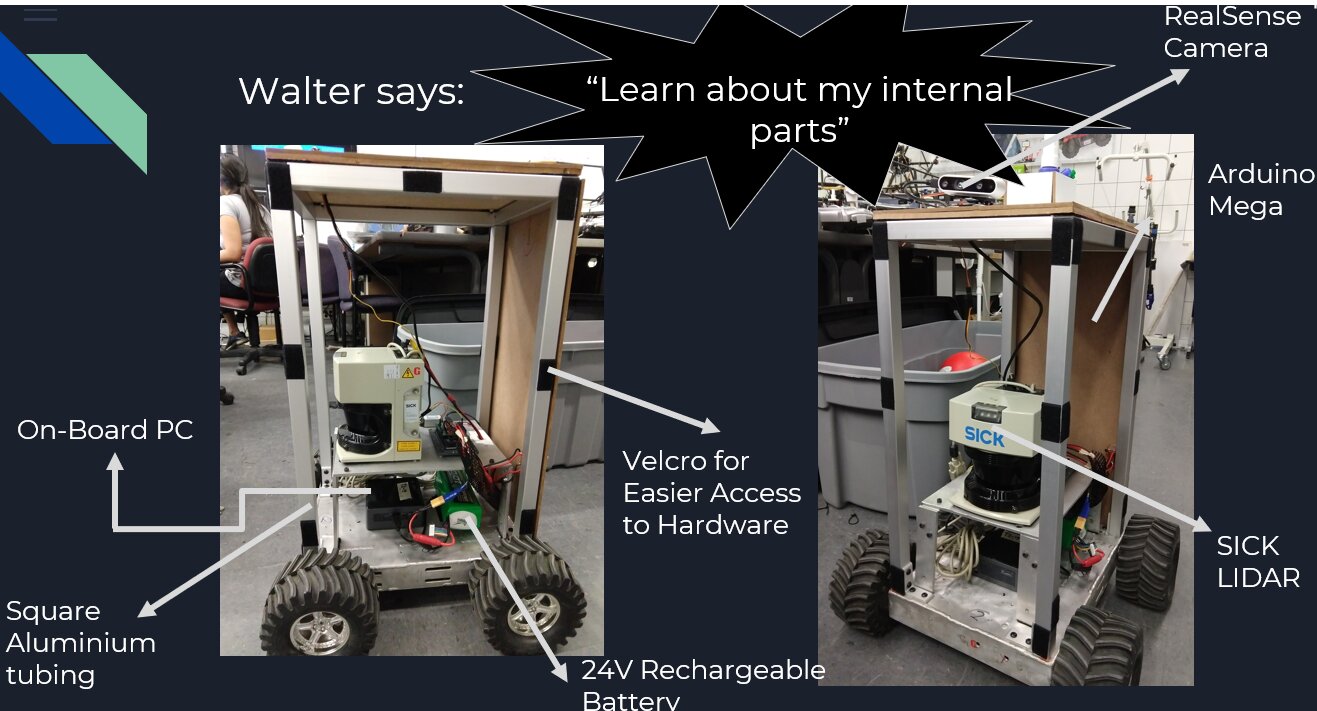

Semi-Autonomous ground Vehicle was a semester project that I completed with my teammate Arthur Pawlica. The project challenge was to transform a ground vehicle to a catering service robot.The team applied knowledge from mechanical design, system integration, establishing wireless communication, object detection, SLAM and autonomous navigation through an open source platform like ROS.
Role
- Controlled pan/tilt of ROCAM using joysticks and keyboard.
- Generated Sick Lidar and Real Sense depth camera images using sicktoolbox_wrapper and openni2 package in the GUI.
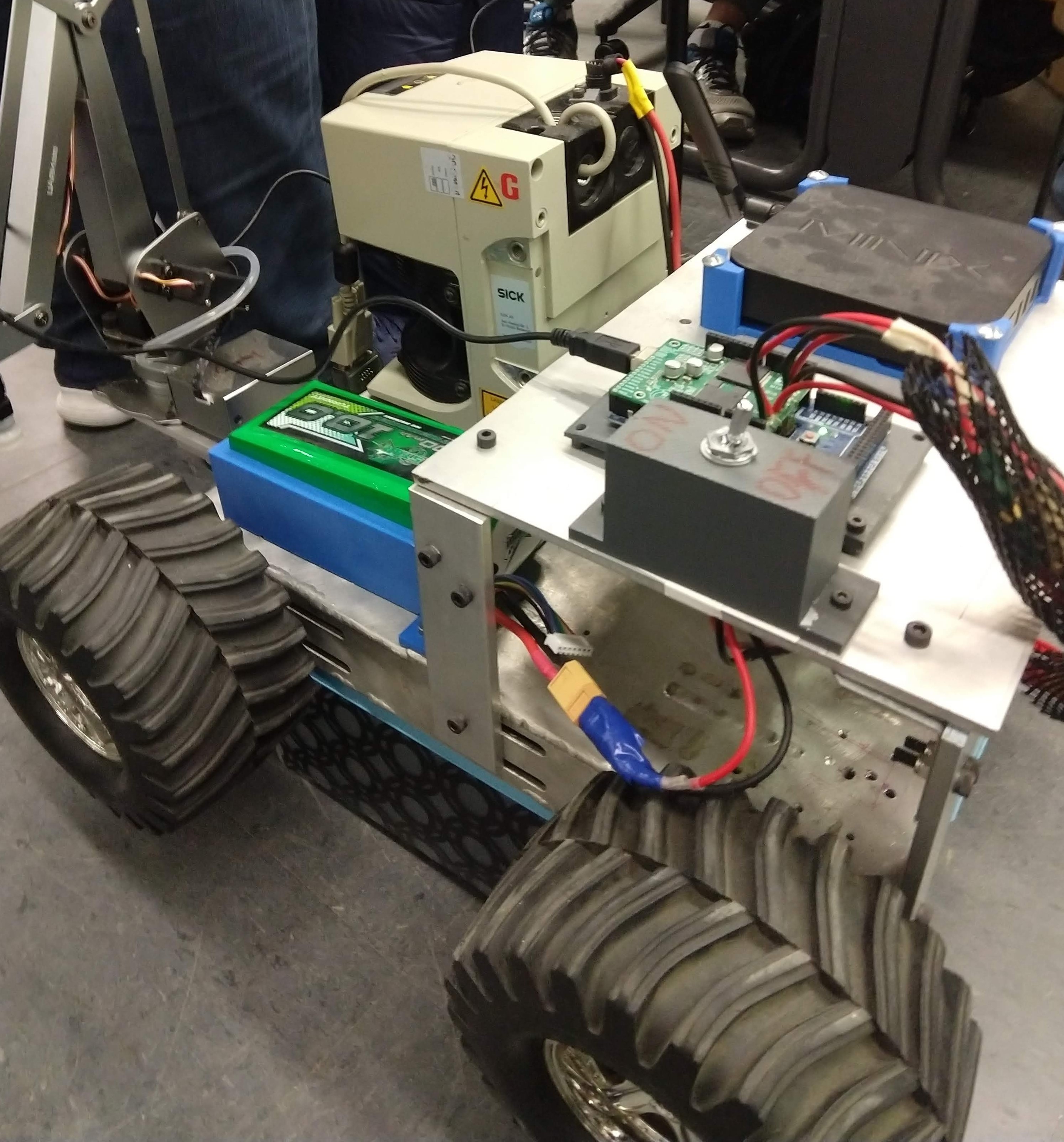
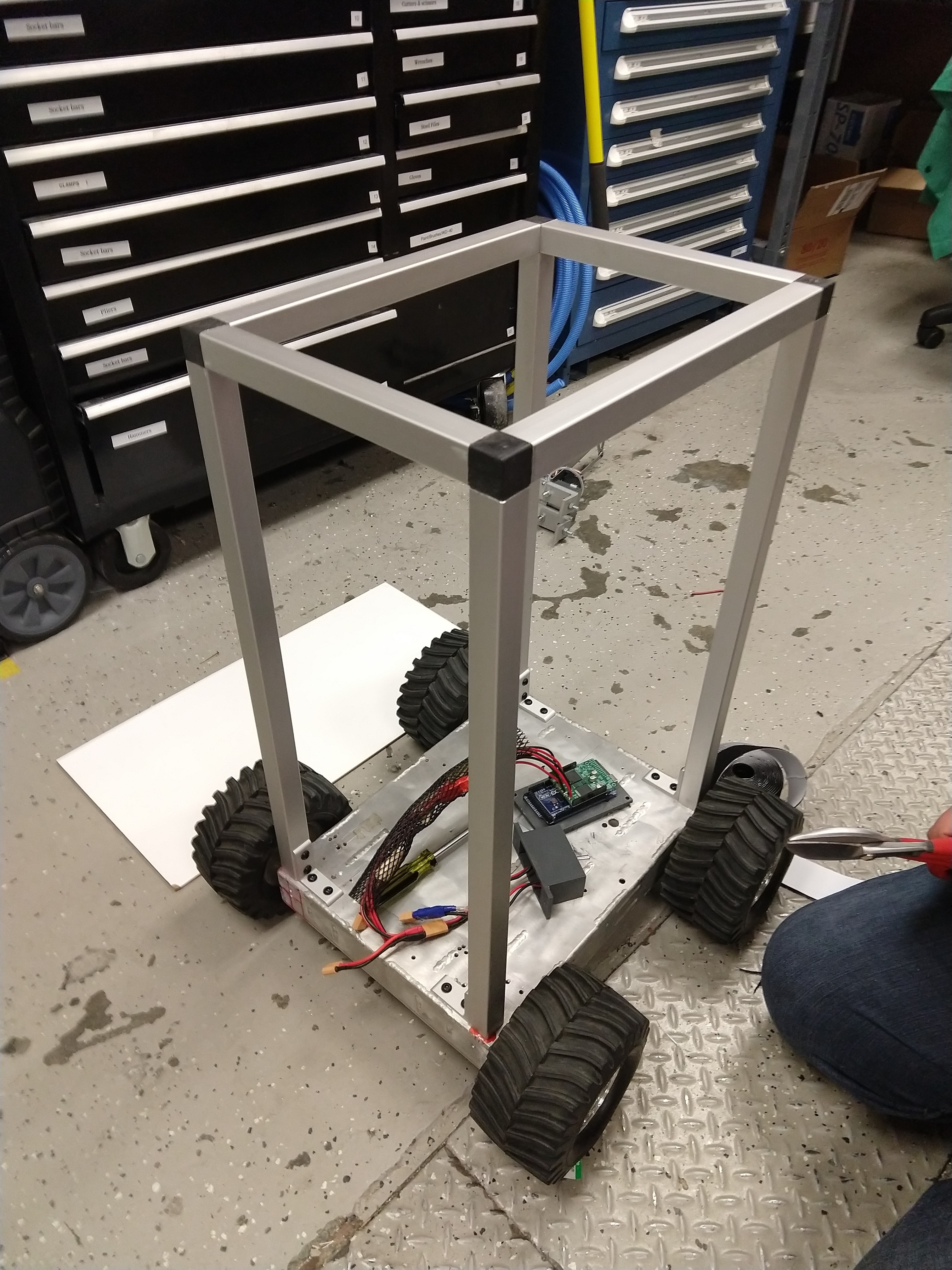
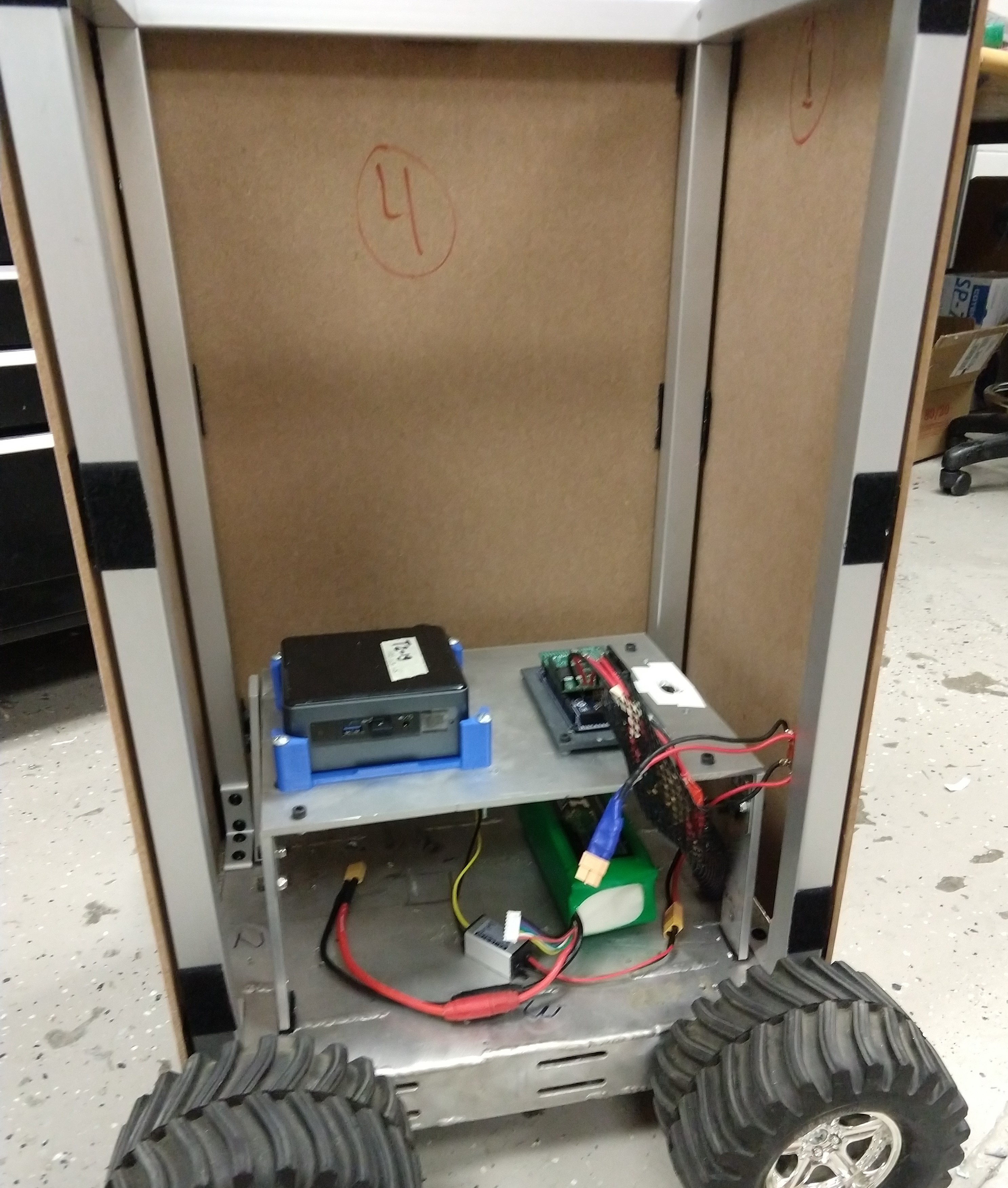
- Built mechanical frame for adequate positioning of sick lidar, intel real sense camera, actuators, arduino board, battery and on-board pc on the robot.
- Controlled robot actuators using rosserial_Arduino package.
- Established Network Communication between the Base Station and the on-board pc.
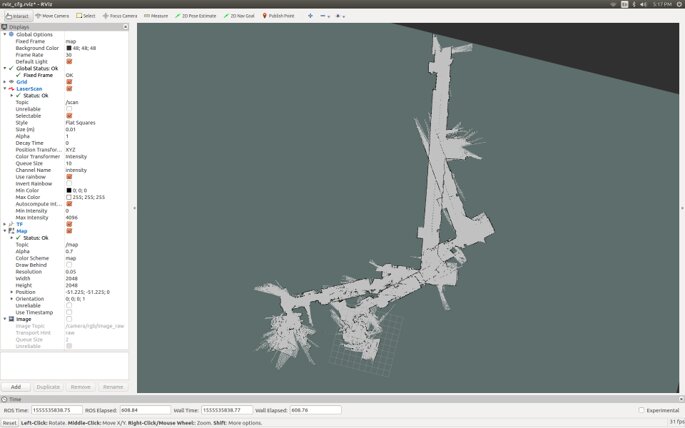
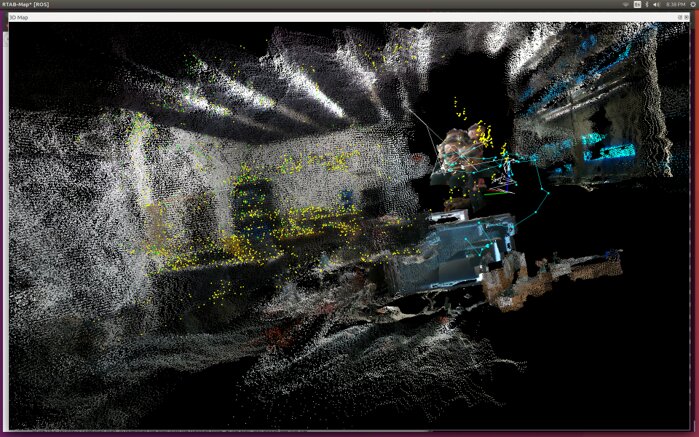
- Implemented 2D and 3D slam using the Gmapping and Rtabmap package respectively in ROS.
Software used
- ROS
- Arduino
Robot Inverse Kinematics

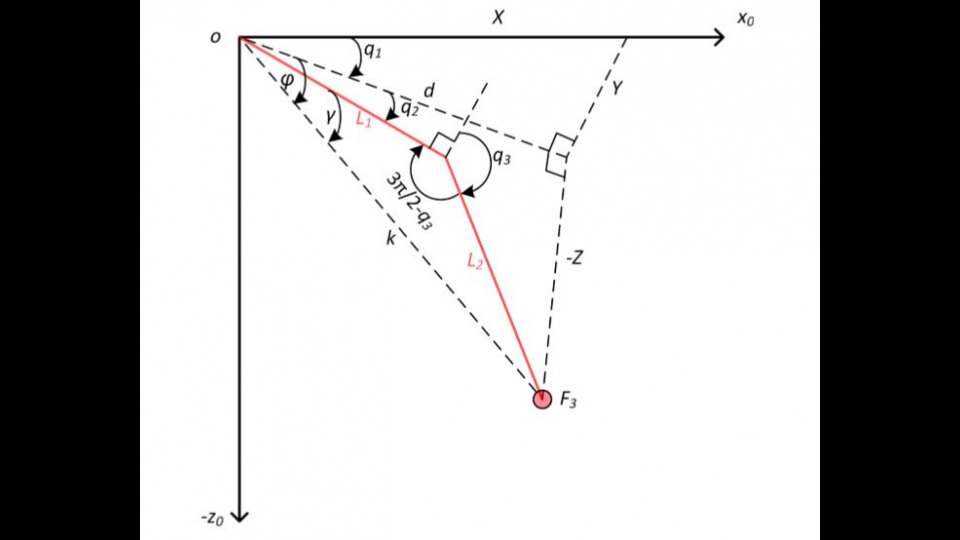
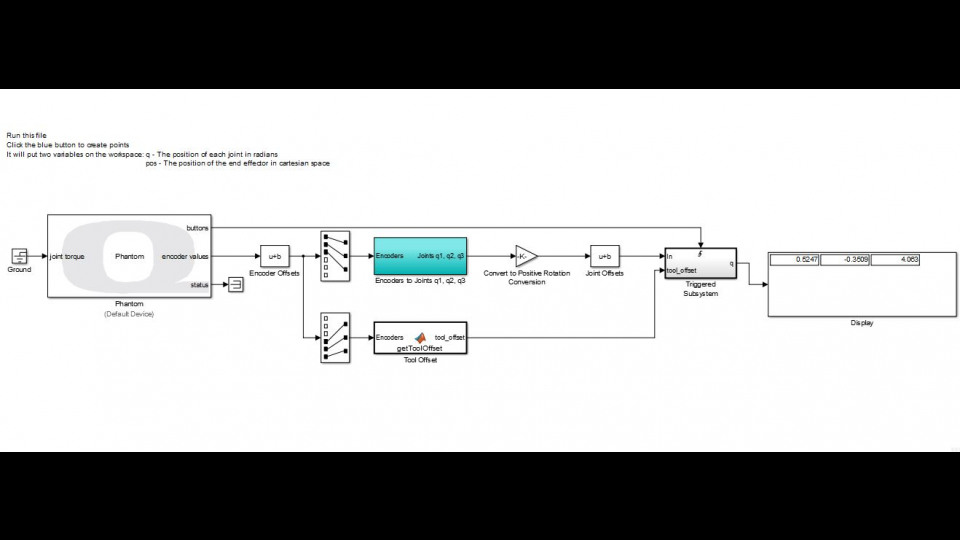
The project was to develop an inverse kinematics relation for the Geomatic Touch. The purpose of the analysis is to determine the position of each joint (q1,q2 and q3) given the position and orientation of the end-effector, in real time.
Role
- Developing the inverse kinematics equations using a geometric approach.
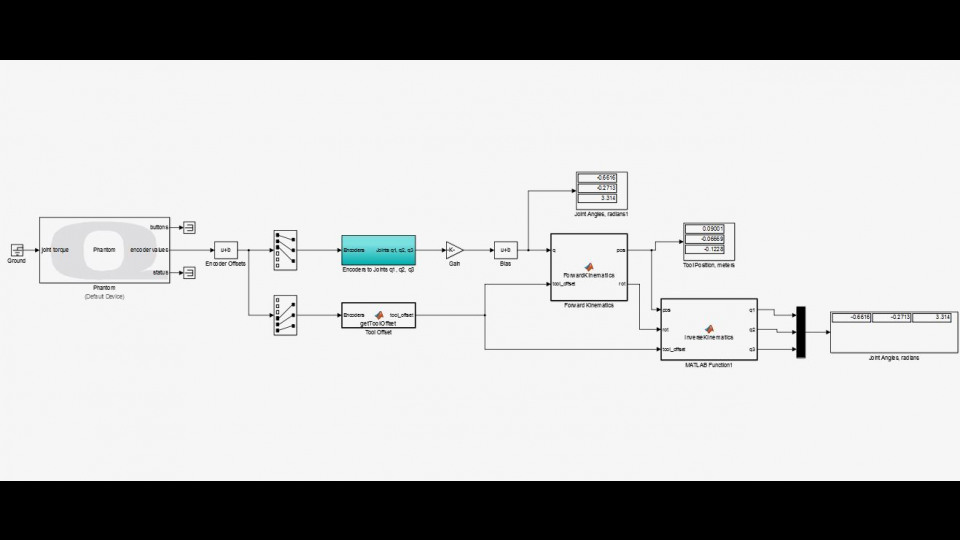
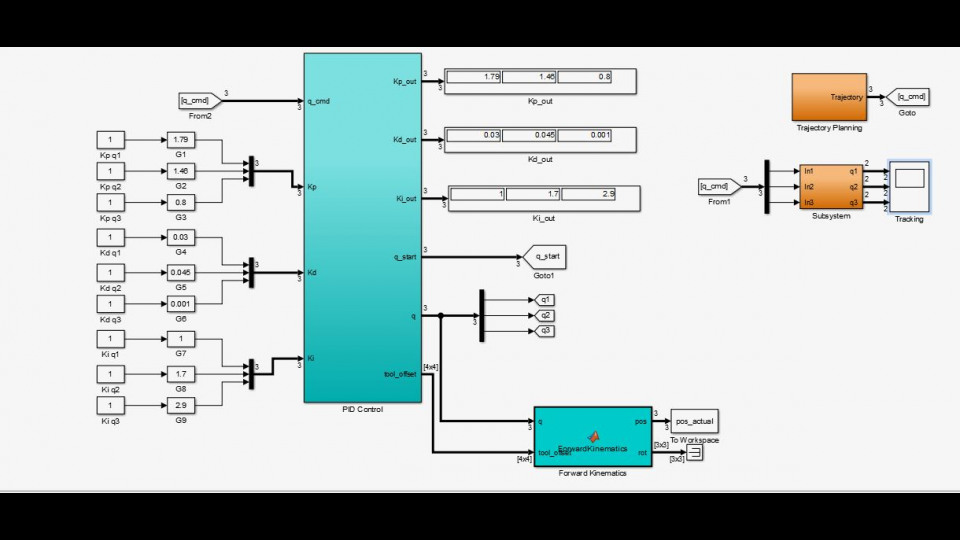
- Creating Simulink model using function blocks and mux block to find and verify the joint angles using inverse kinematics and forward kinematics approach.
- Real time analysis at separate points on the analysis plate of Geomatic touch.
Software used
- Simulink
Robot Joint Space
The project was to teach complete path traversed to omni robot via joint space analysis .
Role
- Using an existing Simulink model to teach points to the robot.
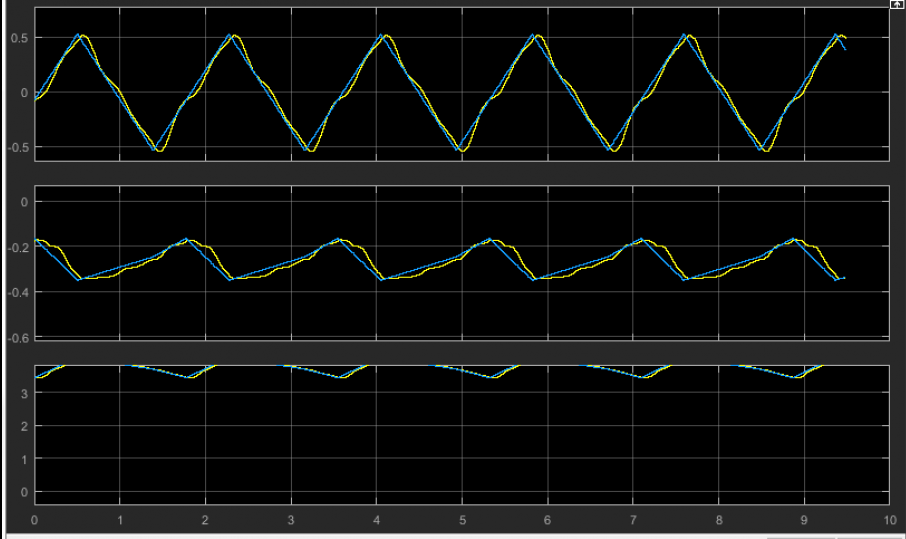
- Creating linear trajectories between each point in joint space.
- Using an existing Simulink model to control each joint of the robot along the linear path.
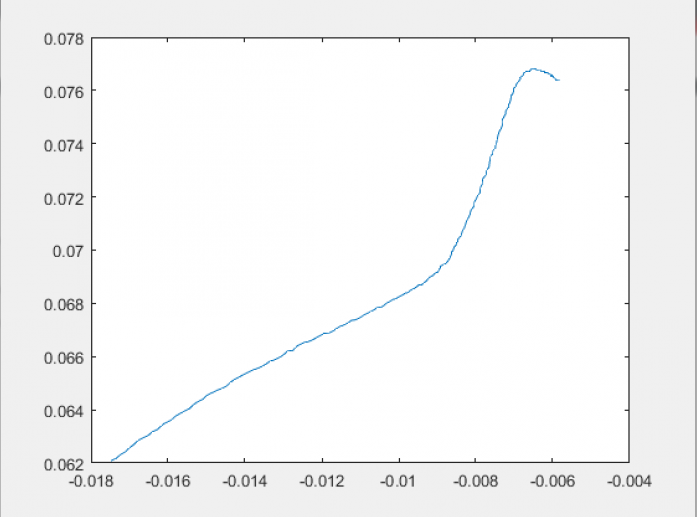
- Created Plots for the path traversed by the Omni robot arm.
Software used
- Simulink
Hexacopter Hardware Upgrade

Role
- Selected adequate multi-rotor design and power system to sustain a load in space.
- Assembled 5 hexacopters in TREC lab for the MBZIRC (an international) competition held in Abu Dhabi.
Line Following Robot
The project was part of my freshman level engineering class where my curiosity for robotics started, I learned to control arduino with Matlab. The objective of the project was to control a line following robot and increase the quality of it's motion (i.e. making the motion of the robot smooth, it closely following the line and completing its objective of reaching the finishing line).
Role
Writing and Refining the Matlab code to address issues:
- Following the provided line closely even in situations of sharp turns.
- Improving the quality of its motion while following the line like reducing the jerking behavior.
- Commenting the Matlab program for it to be understood by a person with little programming experience.